操作系统之进程管理
现代的OS基本都是多道处理系统,也就意味着一个操作系统会并发运行多个程序,为了方便描述和控制这些“Running Application",人们引入了进程的概念。
# 进程实体
# 主存中的进程形态
主存中的进程是一段连续存储的空间,这段空间被称之为进程控制块。进程控制块是用于描述和控制进程的数据结构,同时它也是使得进程能够独立运行的基本单位。
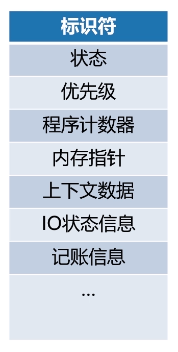
- 标志符:用来标记一个进程,用于区别其他进程。
- 状态:用来标记进程的状态,如“阻塞态”,“运行态”等等。
- 程序计数器:和计组中的计数器概念差不多,用来存储进程即将执行下一条指令的地址。
- 内存指针:存储和程序指针以及进程位置相关的信息。
- 上下文:上下文区域存储的是当前进程正在执行时CPU中的寄存器和高速缓存中数据。
- IO状态信息:记录当进程执行IO操作时所占用的文件列表。
- 记账信息:记录进程使用CPU的时间,时钟数总和等等。
由于PCB要经常被读取,因此它会被OS置于一块常驻的区域内存中。
# 进程与线程
进程是进行资源分配与调度的基本单位,拥有一定的资源,通过进程IPC进行通信。 线程是操作系统进行调度的最小单位,线程不拥有资源,但它可以共享进程的资源。线程只能通过读写同一进程的数据进行通信。
# 五状态模型
# 创建状态
当进程拥有PCB但是其他所有资源还没就绪的状态。
操作系统会提供fork()函数接口来让应用程序创建进程。
# 就绪状态
当进程所需要的所有资源都准备好,但只差CPU资源的时候,我们就可以说进程进入了就绪状态。
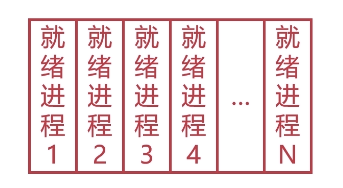 当多个进程处于就绪状态的时候,它们会形成就绪队列。
当多个进程处于就绪状态的时候,它们会形成就绪队列。
# 执行状态
当进程获得全部资源(包括CPU资源),此时就会进入执行状态。
在单处理机中,某个时刻内只能有一个进程处于执行态。
# 阻塞状态
当进程由于缺少资源(最典型的是发起IO请求)而放弃CPU的时候,我们就可以说此时进程处于阻塞状态。
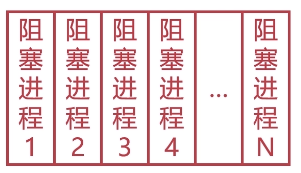 当多个进程处于阻塞状态时,它们就会形成阻塞队列。
当多个进程处于阻塞状态时,它们就会形成阻塞队列。
# 终止状态
当进程结束被系统回收(此时会归还PCB)的状态。
# 五状态之间的转换
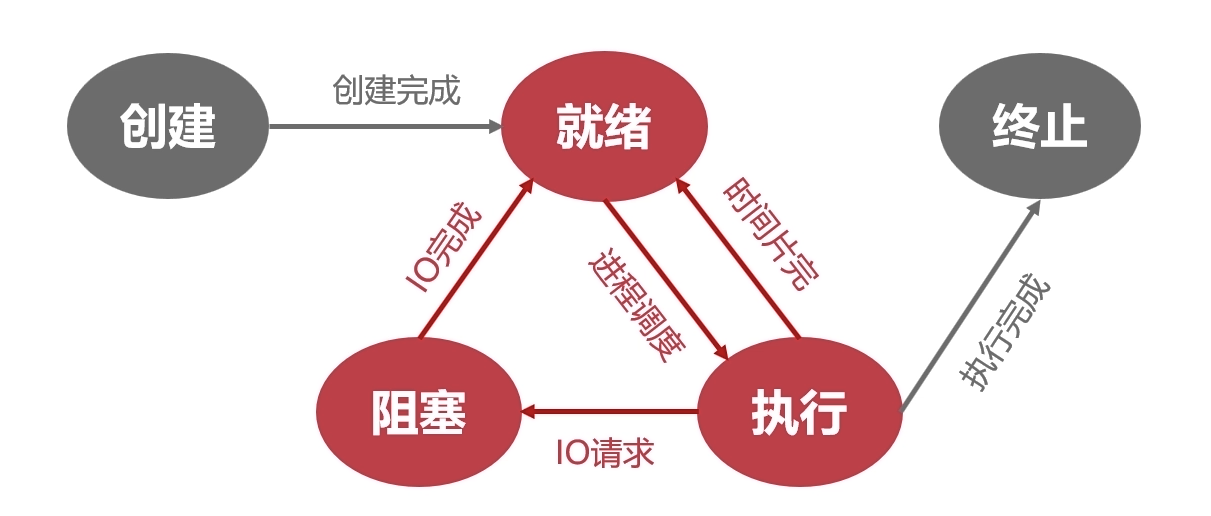 当进程被创建后,并且获得了除CPU资源的所有资源,就会进入就绪状态(或进入就绪队列)。在就绪状态,一旦被调度(获得CPU资源),就会进入执行态。反之,如果不被调度(CPU资源用完),就会重新返回就绪态。当进程在执行态发起IO请求时,就会进入阻塞态。IO操作一旦完成,会回到就绪态,等待被调度。当进程在执行态运行完成后,会归还PCB,并进入终止态。
当进程被创建后,并且获得了除CPU资源的所有资源,就会进入就绪状态(或进入就绪队列)。在就绪状态,一旦被调度(获得CPU资源),就会进入执行态。反之,如果不被调度(CPU资源用完),就会重新返回就绪态。当进程在执行态发起IO请求时,就会进入阻塞态。IO操作一旦完成,会回到就绪态,等待被调度。当进程在执行态运行完成后,会归还PCB,并进入终止态。
# 进程同步
# 为什么需要引入进程同步
在解释这个问题之前,首先要引入两个著名的问题。
# 生产者-消费者问题
有一群生产者在生产产品,生产完成后会将产品放入仓库,同时有一群消费者在消费产品,它们会从仓库中拿走产品并消费。
这个问题在宏观条件下并不会出现什么差错,但类比放入计算机中的时候,就会出现问题。
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <pthread.h>
#include <vector>
pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;
int num = 0;
//生产者函数,模拟生产1000000个产品
void *producer(void*){
int times = 10000000;
while(times --){
// pthread_mutex_lock(&mutex);
num += 1;
// pthread_mutex_unlock(&mutex);
}
}
//消费者函数,模拟消费1000000个产品
void *comsumer(void*){
int times = 10000000;
while(times --){
// pthread_mutex_lock(&mutex);
num -= 1;
// pthread_mutex_unlock(&mutex);
}
}
int main(){
printf("Start in main function.");
//分别用线程来模拟生产者和消费者
pthread_t thread1, thread2;
pthread_create(&thread1, NULL, &producer, NULL);
pthread_create(&thread2, NULL, &comsumer, NULL);
pthread_join(thread1, NULL);
pthread_join(thread2, NULL);
printf("Print in main function: num = %d\n", num);
return 0;
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
上述代码用C++简单模拟了一下生产者-消费者的模型,我们用生产者生产出了1000000个产品,同时又用消费者消费了1000000个产品,理论上来说,我们最终print出来的num应该是0,但结果却很诡异:
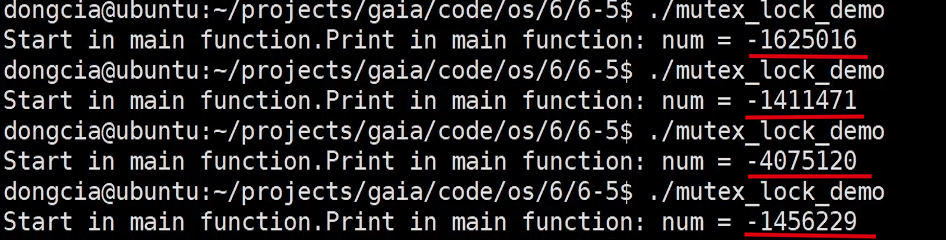
很明显结果是不对的,问题到底出在哪?
问题出在计算机操作“仓库”(缓冲区)的层次上。
当计算机要操作缓冲区时,不管是生产者还是消费者,都要经历三步。
- 把数据从缓冲区拿出来,放到寄存器里。
- 在寄存器里对数据进行操作。
- 操作完成后将数据放回缓冲区。
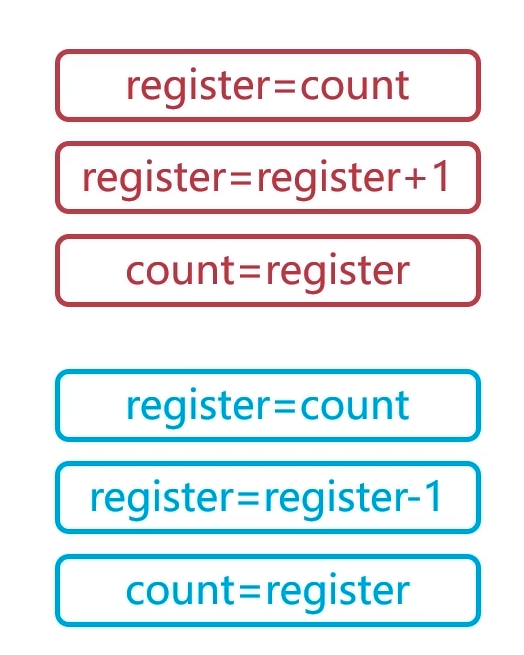 假如说count是缓冲区,register是寄存器,上述就是一个生产进程一个消费进程顺序执行的理想情况,这肯定是不会出错的。
假如说count是缓冲区,register是寄存器,上述就是一个生产进程一个消费进程顺序执行的理想情况,这肯定是不会出错的。
但如果这两个进程的执行顺序是交叉执行(别忘了现代OS都支持进程并发),最终就的不到想要的结果。
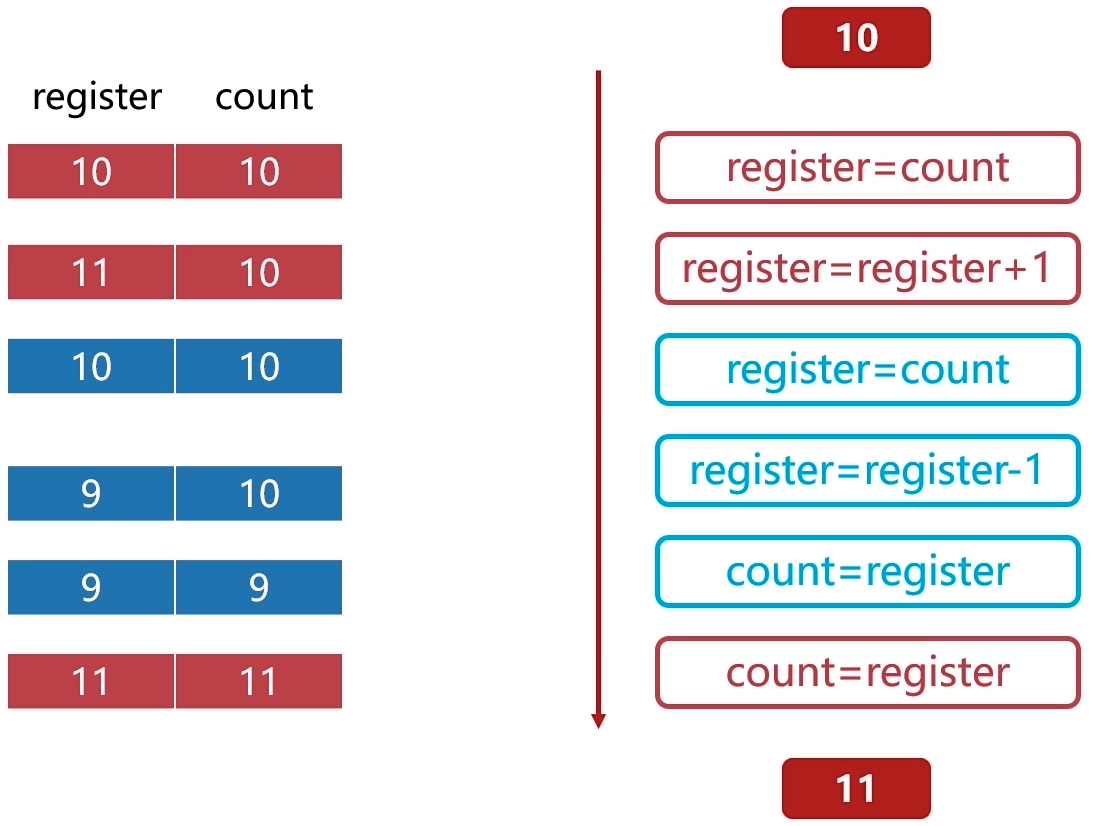 上图简单的描述了这种情况。我们很容易发现:生产者进程还没生产完毕,消费者进程的手就伸过来了。那么消费者进程拿到的只能是初始值10,最终一个生产一个消费产生的结果只能是9或11(看这俩进程谁先跑完)。
上图简单的描述了这种情况。我们很容易发现:生产者进程还没生产完毕,消费者进程的手就伸过来了。那么消费者进程拿到的只能是初始值10,最终一个生产一个消费产生的结果只能是9或11(看这俩进程谁先跑完)。
看到这里我们应该就能想到,如果我们强制性的控制下他们的执行顺序,就不会产生这种情况。
接下来看第二个问题。
# 哲学家进餐问题
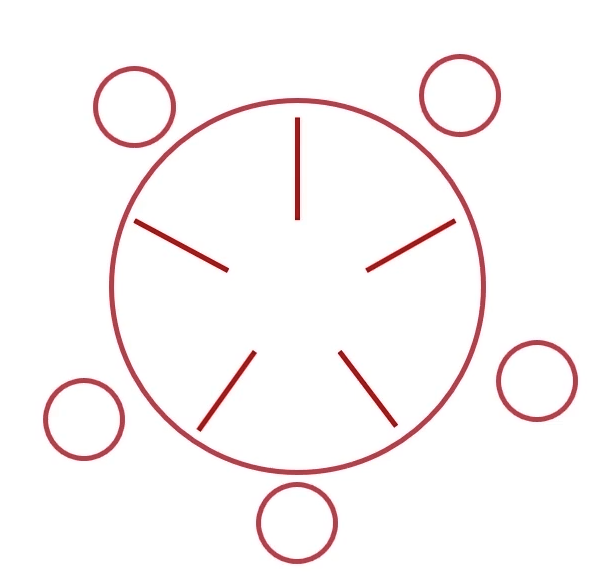 假设有五个哲学家,他们每天的生活只有🍚,🤔和😪,他们五个人共用一张桌子,桌子上有五个碗,但是只有五根筷子。当他们饿的时候,会先拿起左边的筷子,再拿起右边的筷子,然后开始吃饭。吃完饭后他们会继续思考。
假设有五个哲学家,他们每天的生活只有🍚,🤔和😪,他们五个人共用一张桌子,桌子上有五个碗,但是只有五根筷子。当他们饿的时候,会先拿起左边的筷子,再拿起右边的筷子,然后开始吃饭。吃完饭后他们会继续思考。
忽然有一天,发生了一件非常可怕的事情。
他们同时饿了,他们又同时拿了左手边的筷子,由于他们都拿不到右手边的筷子,于是他们就全饿死了。。。
进程在调用资源的时候就很像这几个哲学家,一旦出现这种等待资源的情况,就只能被活活饿死,这种情况叫做死锁。
之所以会产生上面两种情况的最本质原因是:进程彼此之间没有相互通信。
假如生产者能够通知消费者自己没有完成生产或已经完成生产,哲学家在吃饭前能够通知邻座的哲学家,都不会出现这种问题。
因此我们需要通过进程同步来帮助控制并发进程和协调临界区资源。
临界区资源:指的是在计算机中虽然被共享但无法被多个线程共同访问的资源。
# 进程同步的原则
# 空闲让进
当临界资源空闲时,允许进程使用。
# 忙则等待
当临界资源有人用,需要使用的进程就只能等着。
# 有限等待
要保证等待的进程等的时间是有限的,而不是一直在那傻等。
# 让权等待
既然进程已经在等临界资源了,那么此时把CPU给它也没啥用啊,菜都没有还怎么做饭。。。不如先把CPU资源让出来(此时就进入了阻塞态)。
# 进程同步的方法
# 消息队列
# 共享存储
# 信号量
具体内容请参考下一篇博客,点此跳转
# 线程同步
# 互斥量
# 读写锁
# 自旋锁
# 条件变量
具体内容请参考下一篇博客,点此跳转
# Linux的进程管理
# 相关概念
# 进程的类型
- 前台进程:能在终端界面和用户交互的进程。
- 后台进程:相对于前台进程,不占用终端界面。执行程序的时候在后面追加一个&就可以以后台进程的方式启动程序。
- 守护进程:是一类特殊的后台进程,会在系统引导时启动,一直运行到系统关闭。
在linux中,进程名字中以“d”结尾的一般都是守护进程,如cround,httpd,sshd,mysqld等等。
# 进程的标记
# 进程ID
PID这一列就是"ProcessID",是一个非负整数,最大值由OS确定,用来标识每一个进程。
ID为0的进程是idle进程,是系统创建的第一个进程。ID为1的进程是init进程,是0号进程的子进程,负责完成系统初始化,同时init也是所有用户进程的祖先进程。
在linux中,可以使用pstree命令来查看进程间的继承关系。
# 进程的状态标记

- R: Running,代表进程正在跑。
- S: Sleeping,代表进程正在处于睡眠状态。
- D: 进程处于IO等待的睡眠状态。
- T: 进程处于暂停状态。
- Z: 进程处于退出状态,或僵尸进程。
# 操作linux进程的常用命令
# ps命令
ps命令可以用于查看当前进程的快照。
- ps -aux:可以打印所有进程的详细信息。
- ps -u [用户名]:查看指定用户的进程。
- ps -aux | grep [“进程名”]or[进程号]:可以查看指定进程的详细信息。
- ps -aux --sort=-pcpu:根据cpu的使用频率进行排序。
- ps -aux --sort=-pmem:根据内存的使用状况进行排序。
- ps -ef --forest:打印所有进程的父子状态。
# top命令
动态监视进程所有状态。
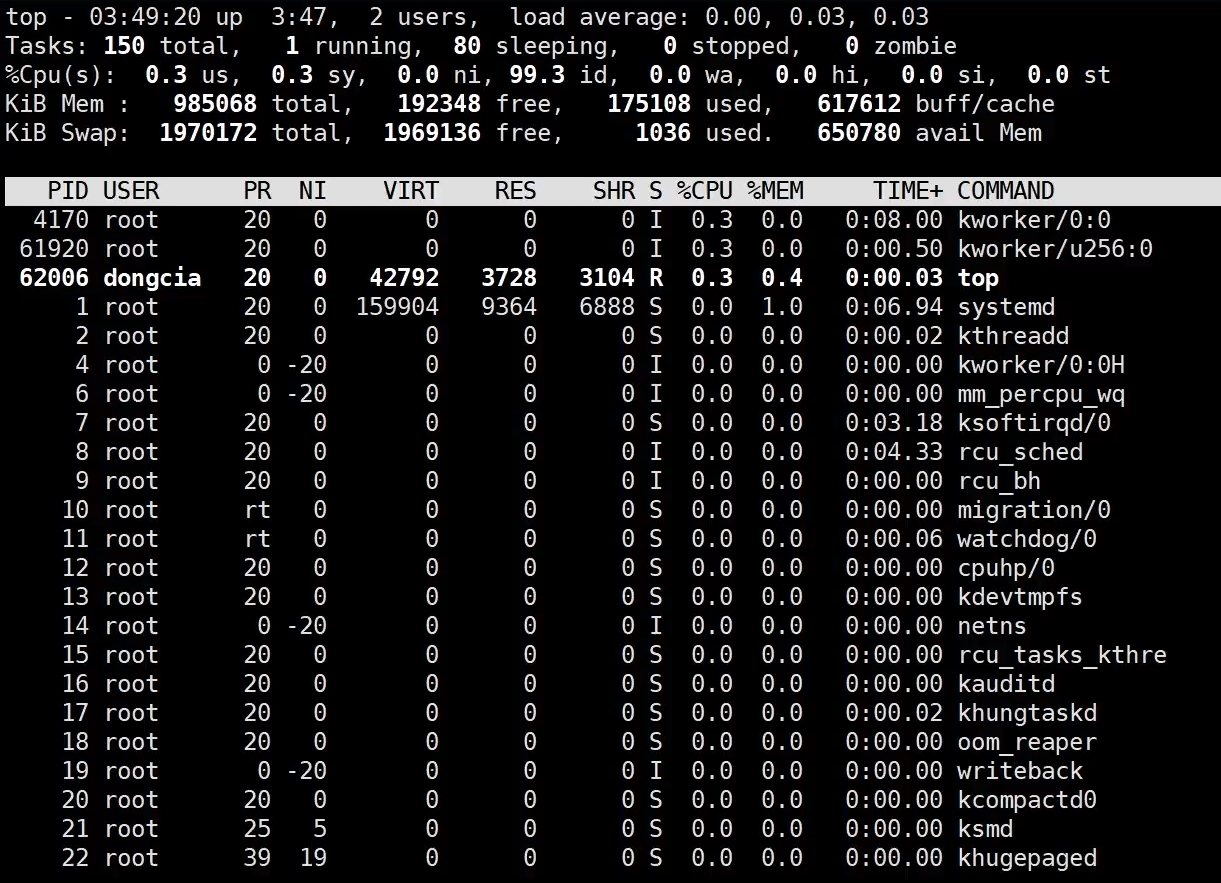 有几个没说的字段需要补充。
有几个没说的字段需要补充。
- PR:进程的优先级。
- VIRT:进程的虚拟内存。
- COMMAND:启动该进程需要的命令。
# kill命令
用于删除执行中的程序或工作。 用的最多的就是kill -9 ["进程名"]or[进程号]